

Lower Limb Muscle Co-Contraction and Coupling Synergy in Exoskeleton Assistance for Load Carriage Walking
-
摘要:为了评估助力外骨骼人机交互性能,探索更优的外骨骼人机结构和人机协调控制策略,通过实验评估了9名健康男性在常规负重和外骨骼助力负重行走中,下肢肌肉平均活动、肌肉成对收缩指标和肌肉整体协调机制的特征与变化. 实验结果表明:外骨骼助力增加了肌肉平均活动,尤其是踝关节跖屈肌腓骨长肌,显示了当前外骨骼在踝关节/脚部位的人机界面设计存在缺陷;降低了成对肌肉的平均收缩指标,增大了肌肉收缩范围;肌肉模块化协作复杂度相似,解释方差水平值分别为95%和96%,但常规负重下的模块仅能描述外骨骼助力时83%~91%的肌电变量,这表明人体在外骨骼助力下不会单一地依赖中心控制和模块控制来协调肌肉活动,而是采取灵活且有规律的神经肌肉调节机制;肌间协作权重和肌肉激活尺度系数呈完全不同的形态,采取了与常规步态下完全不同的控制策略;进一步设计踝关节/脚人机交互界面,参考助力下神经肌肉调节机制规律来设计人机交互策略,将提高外骨骼人机可用性和人机交互性能.Abstract:Human-robot interaction performance was evaluated, and better exoskeleton structures and human-robot adaptability control strategies were explored. The muscle activity, paired-muscle contraction index, and synergy coupling of the muscles of nine healthy male subjects carrying loads and walking with and without the exoskeleton prototype were investigated through evaluation of the conducted experiment. The results show that muscle activity significantly increased compared with normal load carrying, especially for the planter flexor muscle peronaeus longus. Some design defects were observed in the foot/ankle area of the current exoskeleton prototype, and the paired-muscle mean co-contraction index decreased. However, the co-contraction index range was greater than in normal load carriage. The module complexities were similar for both load carriage conditions, with total variances of 95% and 96%. Three modules could describe nearly 95% of the variance in electromyography data during normal load carriage. However, the same modules could only describe 83%–91% of the variance in muscle activity while walking with the exoskeleton. These results show that the muscle activities in healthy subjects will not be modulated by the central control strategy in the process of adaption to the assistance of the exoskeleton. The plot shape of the synergy weights and the muscle activation are significantly different from the normal gait. Hence, better human-robot interface designs in the ankle/foot area and human- robot interaction strategies referenced from the kinds of flexible but principle neuromuscular recruitment mechanisms, would improve the usability and the human-robot interaction performance of the exoskeleton.
-

图 2实验顺序和负重量级拉丁方顺序
Figure 2.Test processes and Latin Square sequences of load carriage levels

图 3下肢肌电信号采集的名称和位置
Figure 3.Names and positions of the lower muscles for the sEMG signal collection

图 4下肢肌电信号非负矩阵的分解与重建图示
Figure 4.Illustration of non-negative matrix factorization and reconstruction of the EMG data from the lower limb muscles
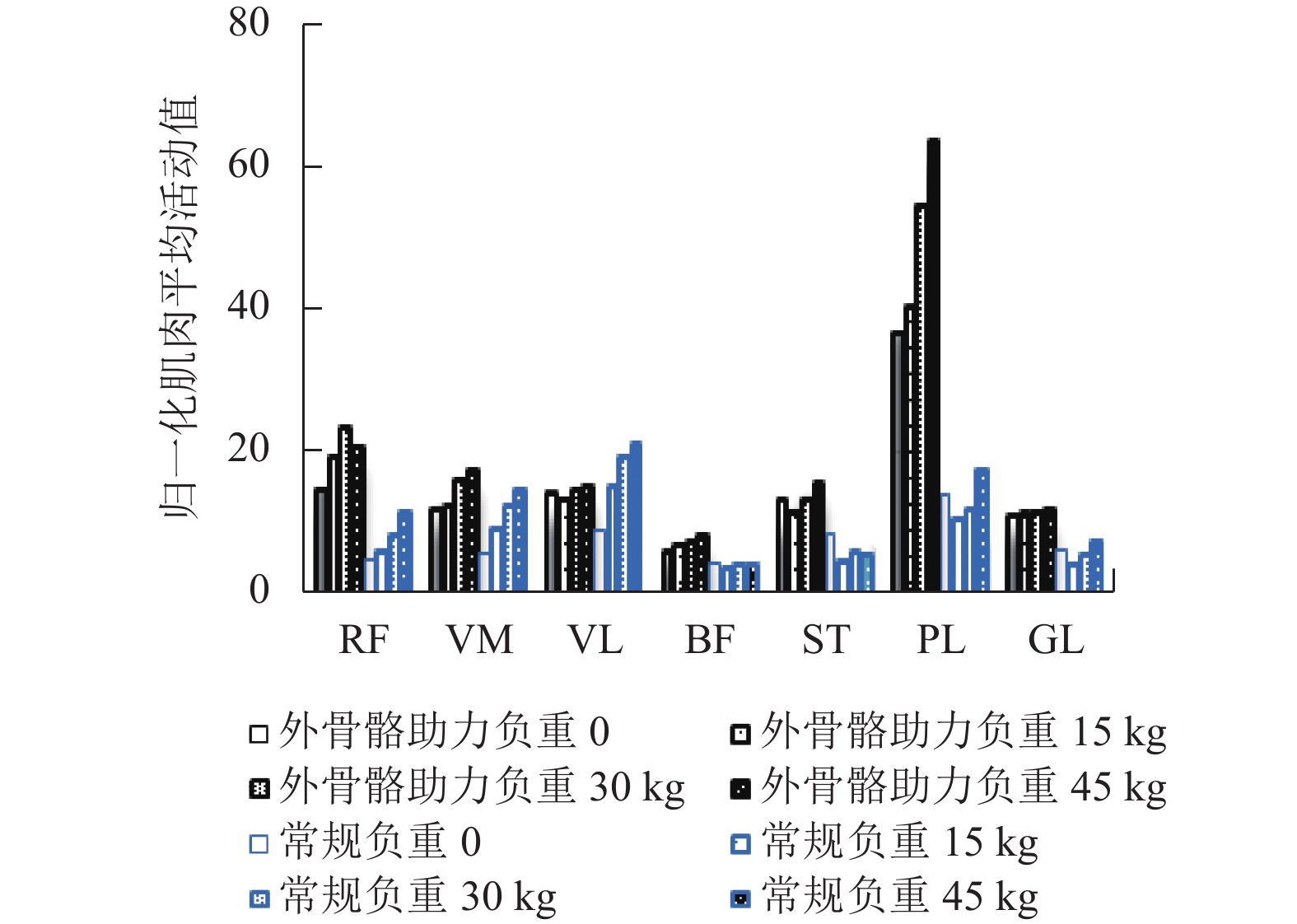
图 5外骨骼助力负重和自然人负重下下肢肌肉活动平均值比较
Figure 5.Comparative mean muscle activities between assistive load carriage using the exoskeleton prototype and conventional load carriage using a backpack

图 6成对肌肉协同收缩指标
Figure 6.Co-contraction index between the agonist and antagonist of flex/flexion movement
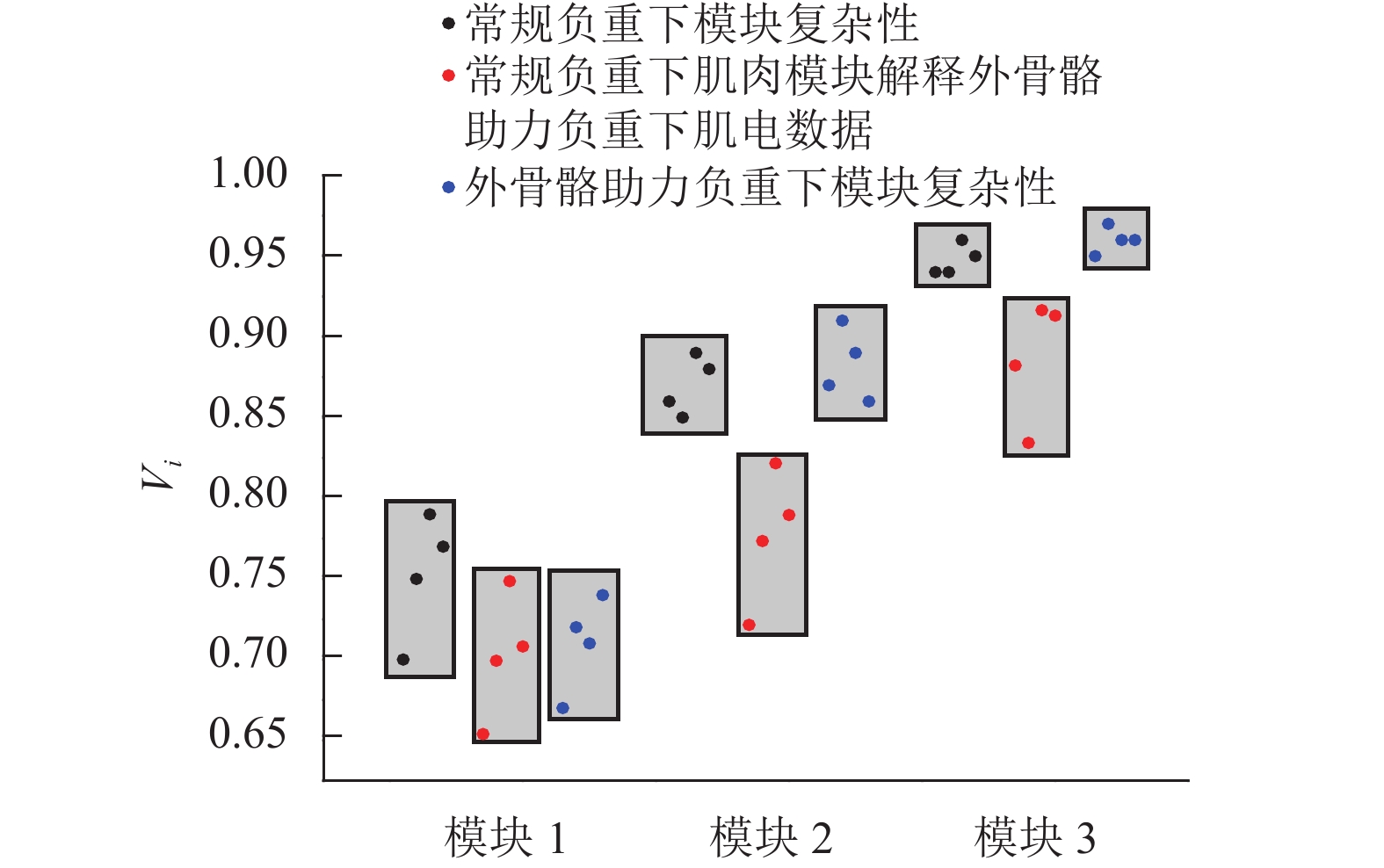
图 7有无外骨骼助力下3模块下肢肌肉群协作模式的总体解释方差比较
Figure 7.Total variance comparison about three modules of the measured lower muscles coordination between without EXO and the with EXO load carriage conditions
-
KIGUCHI K, HAYASHI Y. An EMG-based control for an upper-limb power-assist exoskeleton robot[J]. IEEE Transactions on Systems Man & Cybernetics Part B Cybernetics, 2012, 42(4): 1064-1071 FARRIS, R J, QUINTERO, H A, GOLDFARB M. Preliminary evaluation of a powered lower limb orthosis to aid walking in paraplegic individuals[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2011, 19(6): 652-659doi:10.1109/TNSRE.2011.2163083 RESTREPO-ZAPATA J, GALLEGO-DUQUE C, MARQUEZ-VILORIA D, et al. Two-degree adjustable exoskeleton for assistance of the human arm using a mechanical system of fast assembly and upgradability[J]. International Journal on Smart Sensing & Intelligent Systems, 2017, 10(3): 491-505 KAWAMOTO H, SANKAI Y. Power assist method based on Phase Sequence and muscle force condition for HAL[J]. Advanced Robotics, 2005, 19(7): 717-734doi:10.1163/1568553054455103 KAZEROONI H, STEGER R, HUANG L. Hybrid control of the berkeley lower extremity exoskeleton (BLEEX)[J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(2): 128-138doi:10.1109/TMECH.2006.871087 RASHEDI E, KIM S, NUSSBAUM M A, et al. Ergonomic evaluation of a wearable assistive device for overhead work[J]. Ergonomics, 2014, 57(12): 1864-1874doi:10.1080/00140139.2014.952682 STEELE K M, JACKSON R W, SHUMAN B R, et al. Muscle recruitment and coordination with an ankle exoskeleton[J]. Journal of Biomechanics, 2017, 59: 50-58doi:10.1016/j.jbiomech.2017.05.010 FLEISCHER C, HOMMEL G. A human-exoskeleton interface utilizing electromyography[J]. IEEE Transactions on Robotics, 2008, 24(4): 872-882doi:10.1109/TRO.2008.926860 RANGANATHAN R, KRISHNAN C, DHAHER Y Y, et al. Learning new gait patterns:exploratory muscle activity during motor learning is not predicted by motor modules[J]. Journal of Biomechanics, 2016, 49(5): 718-725doi:10.1016/j.jbiomech.2016.02.006 GRAZI L, CREA S, PARRI A, et al. Gastrocnemius myoelectric control of a robotic hip exoskeleton can reduce the user’s lower-limb muscle activities at push off[J]. Frontiers in Neuroscience, 2018, 12: 1-11doi:10.3389/fnins.2018.00001 SYLOS-LABINI F, LA S V, D’AVELLA A, et al. EMG patterns during assisted walking in the exoskeleton[J]. Frontiers in Human Neuroscience, 2014, 8: 423 YIN Y H, FAN Y J, XU L D. EMG and EPP-integrated human-machine interface between the paralyzed and rehabilitation exoskeleton[J]. IEEE Transactions on Information Technology in Biomedicine, 2012, 16(4): 542-549doi:10.1109/TITB.2011.2178034 IVANENKO Y P, POPPELE R E, LACQUANITI F. Motor control programs and walking[J]. Neuroscientist, 2006, 12(4): 339-348doi:10.1177/1073858406287987 KAWAMOTO H, TAAL S, NINISS H, et al. Voluntary motion support control of Robot Suit HAL triggered by bioelectrical signal for hemiplegia[C]//Annual International Conference of the Ieee Engineering in Medicine and Biology Society. Chicago: IEEE, 2010: 462-466 PETERSON M D, RHEA M R, SEN A, et al. Resistance exercise for muscular strength in older adults:a meta-analysis[J]. Ageing Research Reviews, 2010, 9(3): 226-237doi:10.1016/j.arr.2010.03.004 CAPPELLINI G, IVANENKO Y P, POPPELE R E, et al. Motor patterns in human walking and running[J]. Journal of Neurophysiology, 2006, 95(6): 3426-3437doi:10.1152/jn.00081.2006 刘放,程文明,邬钱涌. 基于缓冲结构设计的携行式外骨骼研究[J]. 机械设计与研究,2012,28(5): 37-40doi:10.3969/j.issn.1006-2343.2012.05.010LIU Fang, CHENG Wenming, WU Qianyong. Research of portable exoskeleton based on buffer design[J]. Machine Design and Research, 2012, 28(5): 37-40doi:10.3969/j.issn.1006-2343.2012.05.010 CLARK D J, TING L H, ZAJAC F E, et al. Merging of healthy motor modules predicts reduced locomotor performance and muscle coordination complexity post-stroke[J]. Journal of Neurophysiology, 2010, 103(2): 844-857doi:10.1152/jn.00825.2009 LUNDBERG H J, ROJAS I L, FOUCHER K C, et al. Comparison of antagonist muscle activity during walking between total knee replacement and control subjects using unnormalized electromyography[J]. Journal of Arthroplasty, 2015, 31(6): 1331-1339 HURD W J, SNYDERMACKLER L. Knee instability after acute ACL rupture affects movement patterns during the mid-stance phase of gait[J]. Journal of Orthopaedic Research, 2007, 25(10): 1369-1377doi:10.1002/jor.v25:10 SOUISSI H, ZORY R, BREDIN J, et al. Comparison of methodologies to assess muscle co-contraction during gait[J]. Journal of Biomechanics, 2017, 57: 141-145doi:10.1016/j.jbiomech.2017.03.029 HEIDEN T L, LLOYD D G, ACKLAND T R. Knee joint kinematics,kinetics and muscle co-contraction in knee osteoarthritis patient gait[J]. Clinical Biomechanics, 2009, 24(10): 833-841doi:10.1016/j.clinbiomech.2009.08.005 SAITO A, TOMITA A, ANDO R, et al. Muscle synergies are consistent across level and uphill treadmill running[J]. Scientific Reports, 2018, 8(1): 5979 谢平,李欣欣,杨春华,等. 基于表面肌电非负矩阵分解与一致性的肌间协同-耦合关系研究[J]. 中国生物医学工程学报,2017,36(2): 150-157doi:10.3969/j.issn.0258-8021.2017.02.004XIE Ping, LI Xinxin, YANG Chunhua. Research on the intermuscular synergy and coupling analysis based on surface EMG on negative matrix factorization-coherence[J]. Chinese Journal of Biomedical Engineering Machine Design and Research, 2017, 36(2): 150-157doi:10.3969/j.issn.0258-8021.2017.02.004 CHVATAL S A, TING L H. Common muscle synergies for balance and walking[J]. Frontiers in Computational Neuroscience, 2013, 7(5): 48 SAWERS A, ALLEN J L, TING L H. Long-term training modifies the modular structure and organization of walking balance control[J]. Journal of Neurophysiology, 2015, 114(6): 3359-3373doi:10.1152/jn.00758.2015 KOLLER J R, JACOBS D A, FERRIS D P, et al. Learning to walk with an adaptive gain proportional myoelectric controller for a robotic ankle exoskeleton[J]. Journal of Neuroengineering & Rehabilitation, 2015, 12(1): 1-14 YOUNG A J, FOSS J, GANNON H, et al. Influence of power delivery timing on the energetics and biomechanics of humans wearing a hip exoskeleton[J]. Frontiers in Bioengineering & Biotechnology, 2017, 5: 1-11 -

 下载:
下载:








 点击查看大图
点击查看大图

计量
- 文章访问数:517
- HTML全文浏览量:257
- PDF下载量:34
- 被引次数:0